Efektivitas pelatihan robotik VR
Pembedahan robotik semakin umum, mengharuskan ahli bedah mengembangkan keterampilan unik yang berbeda dari teknik tradisional. Pelatihan simulasi mendukung pengembangan keterampilan ini sambil meningkatkan keselamatan pasien. University of Texas Southwestern (UTSW) Medical Center melakukan studi untuk menilai kelayakan, efektivitas, dan transferabilitas keterampilan simulator robotik VR untuk pelatihan residen bedah.
Radi I, Tellez JC, Alterio RE, Scott DJ, Sankaranarayanan G, Nagaraj MB, Hogg ME, Zeh HJ, Polanco PM. (22 Februari 2022) Kelayakan, Efektivitas dan Transferabilitas Platform Pelatihan Robotik Realitas Virtual Berbasis Penguasaan Baru untuk Residen Bedah Umum. Surgical Endoscopy 36(10): 7279–7287.
https://doi.org/10.1007/s00464-022-09106-z
Pelatihan praktis merupakan komponen fundamental dari pendidikan medis. Pengetahuan dan pengalaman yang diperoleh pada tahap ini sangat penting untuk meminimalkan kesalahan di masa depan. Penggunaan VR untuk pelatihan bedah menyediakan lingkungan yang efektif dan aman untuk membangun dan meningkatkan keterampilan teknis dan manual para trainee.
Pelatihan robotik VR untuk mahasiswa
Pelatihan komprehensif dokter bedah sangat penting pada tingkat residen. Bedah berbantuan robotik (RAS) menyediakan manfaat seperti pengurangan tremor, peningkatan ketangkasan, dan visualisasi 3D, tetapi juga menuntut pengembangan keterampilan khusus. Operator yang tidak berpengalaman mungkin mengalami kesulitan mengatasi tantangan seperti umpan balik haptic terbatas dan operasi sistem yang kompleks.
Dari 2019 hingga 2021, University of Texas Southwestern (UTSW) Medical Center menerapkan kurikulum VR baru yang bertujuan mengembangkan keterampilan inti bedah robotik di kalangan residen. Residen melakukan 33 tugas SimNow® VR hingga mencapai skor komposit ≥90 (dari 100), yang didefinisikan sebagai penguasaan.
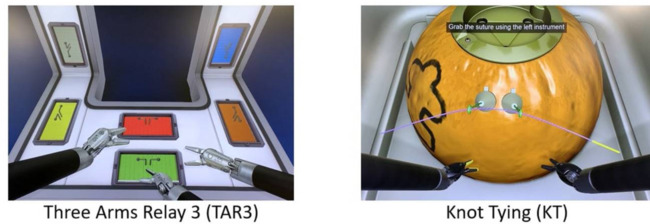
Tugas VR mencakup Around the World Needle Driving, Big Dipper Needle Driving, Ring Roller Coaster 4, Knot Tying, dan Three-Arm Relay 3. Empat tugas pertama dipilih karena kemiripan dengan tugas inanimate.
Pelatihan menghasilkan 83% trainee mencapai penguasaan pada semua 33 tugas VR. Dibandingkan dengan pre-test, peningkatan performa diamati pada post-test di setiap metrik VR pada setiap tugas baik mempertimbangkan semua trainee sebagai kelompok, hanya PGY2, maupun hanya PGY4.
Peningkatan yang jelas dalam performa keseluruhan pada keempat tugas virtual reality diamati. Pada saat yang sama, waktu penyelesaian tugas berkurang secara substansial, dan ekonomi gerakan menunjukkan peningkatan yang signifikan. Temuan ini menunjukkan bahwa pelatihan pada platform VR meningkatkan kontrol psikomotor residen, menghasilkan eksekusi tugas yang lebih efektif dan efisien.
Peningkatan melalui VR
Penggunaan realitas virtual untuk pelatihan bedah menyediakan metode yang efektif dan hemat biaya untuk meningkatkan keterampilan teknis para trainee. Melalui simulasi imersif dan interaktif, VR memungkinkan mahasiswa untuk berlatih prosedur bedah berulang kali dalam lingkungan terkendali yang bebas risiko.
Paparan berkelanjutan ini membantu mereka meningkatkan presisi, koordinasi tangan-mata, dan kemampuan pengambilan keputusan tanpa batasan waktu ruang operasi nyata. Pelatihan VR mengurangi kebutuhan akan sumber daya fisik dan pengawasan, menjadikannya alat praktis untuk institusi dengan akses terbatas ke peralatan bedah.
Transferabilitas keterampilan dari lingkungan virtual ke nyata ini mengkonfirmasi implikasi positif penggunaan simulasi VR sebagai komponen awal utama pelatihan bedah robotik. Meskipun terbatas pada satu pusat, studi ini memberikan bukti kuat bahwa pelatihan robotik berbasis VR adalah metode yang efektif dan dapat diskalakan untuk pendidikan bedah dini. Penelitian masa depan harus fokus pada validasi metrik performa VR dan penilaian transfer keterampilan ke pengaturan ruang operasi nyata.
Untuk informasi lebih lanjut, hubungi
info@medicalholodeck.com
Februari 2022